
本メディアでは、AMRを軸にAGV・AGFとの違い、用途別の種類、比較ポイント、メーカー情報、
費用の考え方、導入ステップまでをまとめ、検討の迷いを減らして最短で候補を絞れるように整理します。



【PR】



本メディアでは、AMRを軸にAGV・AGFとの違い、用途別の種類、比較ポイント、メーカー情報、
費用の考え方、導入ステップまでをまとめ、検討の迷いを減らして最短で候補を絞れるように整理します。
WHAT'S NEW:自律走行搬送ロボット最先端
AMR(自律走行搬送ロボット)は、周囲を検知する各種センサーを使って環境を把握し、走行マップを参照しながら目的地までの経路を自分で選んで移動する自律走行搬送ロボットです。
床にテープを貼るなどの固定ルートに依存しにくく、作業者や障害物がいる状況でも停止・迂回を行いながら運用できるため、倉庫や工場の搬送業務を中心に省人化・自動化を進める手段として導入が増えています。

まず混乱しやすいのがAMR・AGV・AGFの違いです。結論から言うと、「レイアウト変更の多さ」
「人との共存」「搬送物(パレットかどうか)」で最適解が変わります。
| 比較軸 | AMR(自律走行) | AGV(経路固定) | AGF(無人フォーク) |
|---|---|---|---|
| 特徴 | 地図を作りながら自律走行して搬送 | 決めたルートを走る無人搬送車 | フォークリフト荷役を無人化 |
| 向く現場 | 変更が多い/人混在/ピッキング | ルート固定で反復搬送 | パレット搬送/入出庫/荷役中心 |
| 柔軟性 | 高(経路変更しやすい) | 中(変更に工事/手間) | 中(荷姿・通路条件に依存) |
| 導入の要点 | 運用設計(渋滞/有線ルール) | 経路設計・敷設の管理 | 荷役条件・安全要件の整備 |
| つまずきやすい点 | 混雑で止まる/行き止まり | 拡張・変更コスト | 床/通路/ラック条件不足 |
次のどれが一番近いかで
候補が決まります
AMR(自律走行搬送ロボット)は、工場・倉庫・医療現場などでの搬送業務を自動化し、
人手不足や作業負担の課題を解決する手段として注目されています。
AMRの種類は「牽引型」「リフト型」「棚搬送型」など複数あり、用途に合わない機種を
選んでしまうと、かえって効率が落ちるケースもあります。
以下では、AMRの種類ごとの用途や特徴を一覧で整理しています。自社の搬送業務に
近いパターンを確認しながら、最適なタイプを見つけていきましょう。

| 種類 | 用途 | 事前に確認したいこと |
|---|---|---|
| 牽引型 | 台車・カゴ車などをまとめて引く。 工程間搬送で効きやすい。 | 連結運用、通路幅、停止復帰 |
| トップモジュール型(載せ替え) | 上物を変えて汎用輸送。 拡張しやすい。 | 上物設計、受け渡し、拡張 |
| 棚輸送型 | 棚を作業者へ運び、 ピッキング歩行を減らす。 | 棚企画、混雑、動線設計 |
| リフト型(昇降) | 棚やパレットの受け渡しに強いが 条件整理が重要。 | 安全、床/段差、設備条件 |
| 種類 | 特徴 |
|---|---|
| SLAM系(レーザー/ビジョン) | レイアウト変更に強い反面、環境条件(反射・照度・粉塵)で安定性が変わる |
| マーカー/テープ併用 | ルートの安定性を優先。変更コストが出る |

歩行・往復の削減
歩行・往復の削減
搬送の平準化
属人化を減らし、ピーク対応を
しやすくする
レイアウト変更に追随
固定ルートに比べ、変更への
対応力が高い

運用設計が必要
混雑・行き止まり・優先ルールが
成果を左右する
連携コストがブレる
WMS/WCS/設備I/O/エレベーター
などで工数が変わる
止まったときの復帰が重要
停止率より復帰時間が運用負荷を決める
渋滞・行き止まり・停止
AMRは“現場運用”で差が出ます。特に多い課題を先に把握し、
PoCで再現して確認すると導入後のトラブルを減らせます。
台数が増えるほど渋滞と行き止まりが起きやすくなります。
対策は、待避ポイント、一方通行、優先ルール、混雑エリアの速度制御など「運用設計」で決まります。PoCではピーク時間帯を再現して停止率と復帰時間を確認します。


停止は障害物、通信、自己位置推定の乱れなど複合要因で起きます。重要なのは“止まるか”ではなく“何分で復帰できるか”です。
復旧手順、手動介入範囲、アラート通知、ログ確認の方法を決めておくと運用負荷が下がります。
構内物流で多いのがエレベーター連携です。連携可否だけでなく、制御器接続・通信方式・優先制御・安全運用(人の乗降・停止時対応)まで要件として整理すると見積とPoCがブレにくくなります。

メディア推奨
| MiR | オムロン | スタンダード・ロボット | ||
|---|---|---|---|---|
| 製品 | 国際安全規格クリアの 世界的なメーカー | 国内メーカー 最大100台統合制御 | AGVで中国3C業界 トップシェアメーカー | |
| MiR250 | LD-250 | Oasis300E | ||
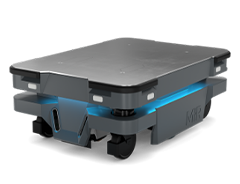 |  | 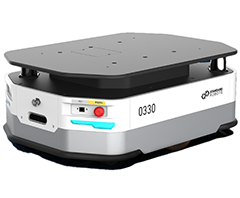 | ||
| 基本情報 | 経路作成 | レーザーセンサーで マップ・回避ルート作成 | レーザーセンサーで マップ・回避ルート作成 | レーザーSLAMナビゲーション でマップ作成 |
| 搬送重量 | 250kg以下 | 250kg以下 | 300kg以下 | |
| 走行 | 前進・後進・旋回 | 前進・後進・旋回 | 前進・後進・旋回 | |
| 走行時間 | 無負荷時:13時間 最大積載時:10時間 | 最大積載時:8時間 | 8時間 | |
| 搬送物積載面積 | 幅580mm×奥行800mm以下 | ー | ー | |
| 走行速度 | 120m/min (2m/秒×60) | 72m/min (1.2m/秒×60) | 75m/min (1.25m/秒×60) | |
| 停止精度 | ±3mm(VLマーカー使用時) | ±8mm(CAPS/HAPS使用時) | ±10mm | |
| 装置重量 | 97kg | 148kg | 125kg | |
| バッテリー | Li-NMC 48V 34.2Ah | ー | リン酸リチウムバッテリー | |
| センサー | LIDAR:前後 3Dカメラ:前方 近接センサー:四隅 | 前後 | LIDER:前後 3Dカメラ:前方 センサー:前後 | |
| ソフトウェア | プログラム | マップ上に位置情報を登録 作業フローで動作指示 | ケースに応じてプログラム | 改造なし |
| インテグレーション | 現場でできる | プログラマーに依頼 | プロがサポート | |
| Fleetソフト | 〇 *オプション品 | 〇 *オプション品 | 〇 ※オプション??? | |
| Fleet台数 | 最大100台 *同一ネットワーク | 最大100台 *同一ネットワーク | 最大999台 | |
| Fleet | 買取 | ライセンス制 | ライセンス制 | |
| 国際規約 ISO 3691-4 | 準拠 | ー | ー | |
| 定期メンテナンス | 日立システムズフィールドサービス | 国内販売代理店によるサポート | ||
| 製品情報 | Mobile industrial robots A/S(デンマーク)は、協働ロボットメーカー「ユニバーサルロボット」と同じテラダイングループ企業です。人と協働作業可能なモバイルロボットを60か国以上200を超える代理店を通じて世界中に提供しています。 | 20万点にも及ぶ膨大な数の制御機器商店を組み合わせ、徹底的に擦り合わせることで、現場目線からの制御アプリケーションを開発します。 | AGVでは中国3C業界トップシェア。ロボットのマッピングアルゴリズム、オペレーティングシステム、コントローラなどのAMRの中核技術研究開発から製品の製造、システム構築まですべてを対応しています。 | |
メディア厳選



MiRの国内正規販売代理店である大喜産業。あらゆる分野のモノづくりに必要な機械要素部品、またその周辺機器を含めた機械装置や設備関連製品を数多く取り揃え、多様化する課題やニーズに対し、トータルソリューションで貢献している企業です。
オムロン株式会社



オムロンは、進化したi-Automation!を軸にモノづくりコンセプトを掲げ、モノづくりを高度に進化させながら、同時に地球環境との共存と働きがいを実現する持続可能なオートメーションを目指し、サステナブルな社会の創造に貢献しています。
スタンダード・ロボット



スタンダード・ロボットは、AGVでは中国3C業界トップシェア。ロボットのマッピングアルゴリズム、オペレーティングシステム、コントローラなどのAMRの中核技術研究開発から製品の製造、システム構築まですべてを対応しています。








