AMRロボットの停止精度を確認!確認すべき性能と選び方を解説 | 搬送ロボットガイド
AMR
AMRロボットの停止精度を確認!確認すべき性能と選び方を解説
公開:2024.01.28 更新:2026.01.29
AMR(自律型搬送ロボット)ロボットを導入する際、見落とされがちですが非常に重要なのが「停止精度」です。停止位置がわずかにずれるだけでも、搬送物の受け渡しミスや設備との干渉、作業効率の低下につながる可能性があります。
特に、自動設備や人と協働する現場では、停止精度が安全性と生産性の両方に直結します。
こちらの記事では、AMRロボットの停止精度を確認する際に押さえておきたい性能のポイントと、現場に合った機種を選ぶための考え方について分かりやすく解説します。
目次
AMRロボットの停止精度の重要性
AMRロボットは、作業員と一緒に作業を行うロボットです。通常の産業ロボットと比較して、作業員との接触事故が生じやすいので、選ぶ際はAMRロボットの停止精度がとても重要です。作業をより安全に、そして円滑に進めるためには、障害物回避能力との併用も必要になります。
◇停止精度は安全性に不可欠
AMRロボットは、協働ロボットといわれるように、通常の産業ロボットとは異なり導入後は同じエリアで作業員とAMRロボットが一緒に働くのが特徴です。そのため、導入後、作業員とAMRロボットの接触事故やAMRロボットの転倒による事故が発生しています。
事故が生じるとケガ人が出て、業務にも支障が生じるため、作業員の安全を確保し業務を円滑に進めるためには、AMRロボットの停止精度が必要不可欠です。
停止精度は、搭載されているナビゲーションによって異なり、DM(データマトリックス)方式、テクスチャ方式、SLAM方式などがあり、SLAM方式は、他のふたつと比較すると停止精度が多少劣ります。
SLAM方式
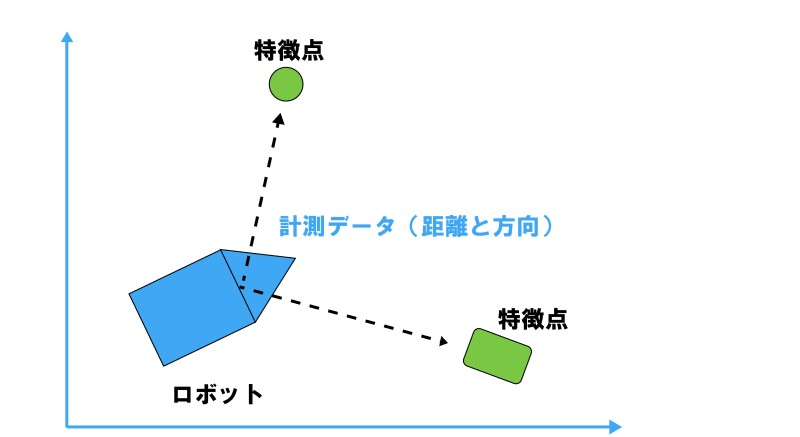
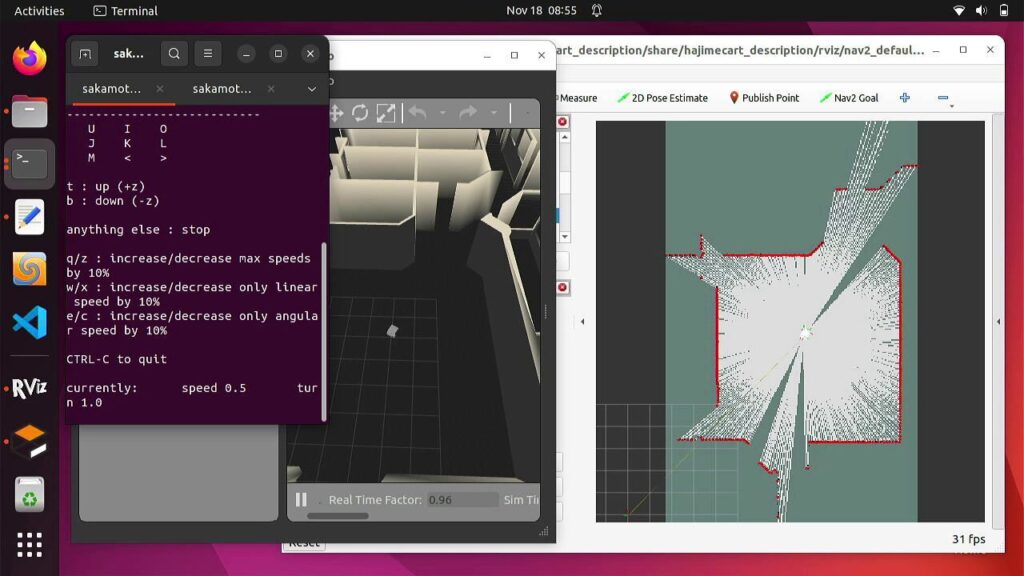
SLAM方式は、ロボットやドローンなどの移動体がセンサーを使って周囲の環境を認識しながら、自身の位置推定と地図作成を同時に行う方式です。
カメラやLiDARなどのセンサーによって、壁や障害物、ランドマーク(目印となる特徴的な物体)までの距離や方向を計測します。取得した情報をもとに、現在位置を推定しながら周辺環境の地図を構築するため、固定された誘導体を設置せずに走行できる点が特徴です。
レイアウト変更が多い現場でも対応しやすく、柔軟な運用が可能になります。
DM方式(データマトリックス方式)

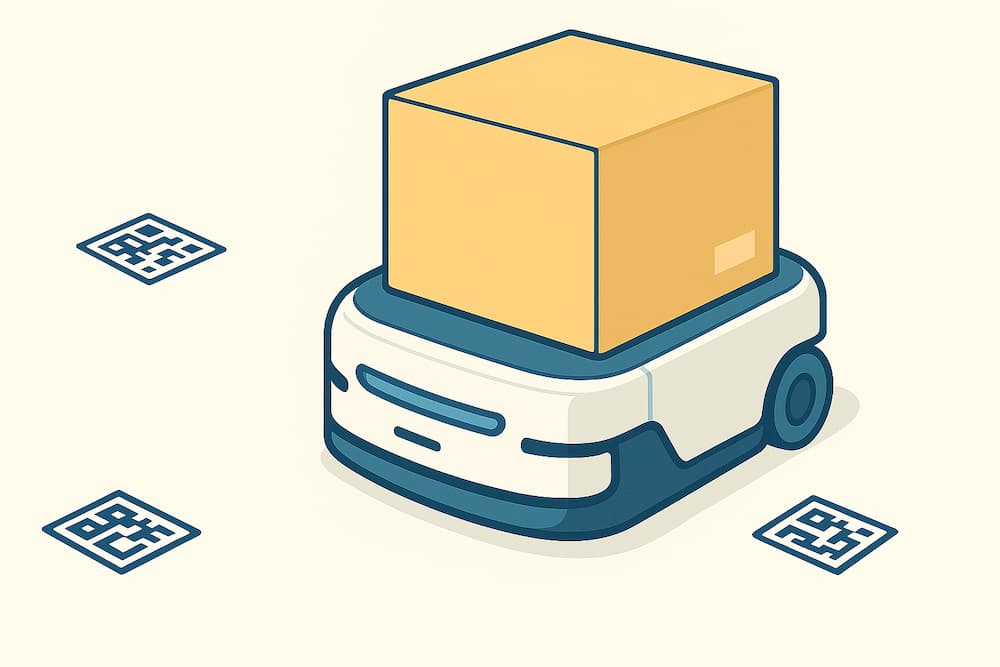
DM方式は、床面などに設置したデータマトリックスコード(2次元バーコード)を読み取って位置を特定する誘導方式です。
データマトリックスコードは情報密度が高く、数ミリメートル程度の小さなサイズでも印刷できる点が特徴です。このコードをカメラで読み取ることで、ロボットは自身の位置を正確に把握できます。
決められたポイントで高精度に停止しやすいため、受け渡し位置や停止位置が厳密に決まっている工程に適しています。
QRコード誘導
QRコード誘導は、地面や壁に設置したQRコードをAGVやAMRが読み取り、位置情報や進行方向を判断する方式です。
QRコードは印刷や設置が容易で、配置変更もしやすいため、レイアウト変更が頻繁に発生する現場でも導入しやすい点がメリットです。また、QRコード自体に情報を持たせることができるため、位置情報だけでなく、タスク指示や経路選択などの情報を与えることも可能です。
テクスチャ方式
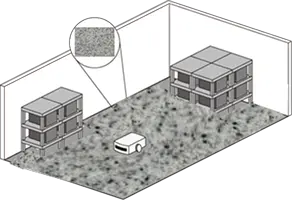
テクスチャ方式は、既存の床面の模様や凹凸などの特徴(テクスチャ)をスキャンし、その特性をもとに自己位置を推定する方式です。
床面の「シグネチャー(特性)」をマッピングすることで、AMRのナビゲーションに必要な絶対測位データを取得します。誘導コードを設置する必要がない点はメリットですが、床の汚れや摩耗、清掃状態によって認識精度が左右される場合があります。
◇障害物回避能力との併用は必須
AMRロボットは、まわりの周辺環境に応じて自動で搬送ルートを算出できる自律走行搬送ロボットです。障害物が合った場合、障害物を回避できれば、停止する必要がなくなり、よりスムーズに運搬作業をこなせるようになります。
障害物回避能力を高める機能としては、LiDARセンサー、超音波センサー、距離を計測できるToFカメラ、減速機能などがあります。
LiDARセンサー
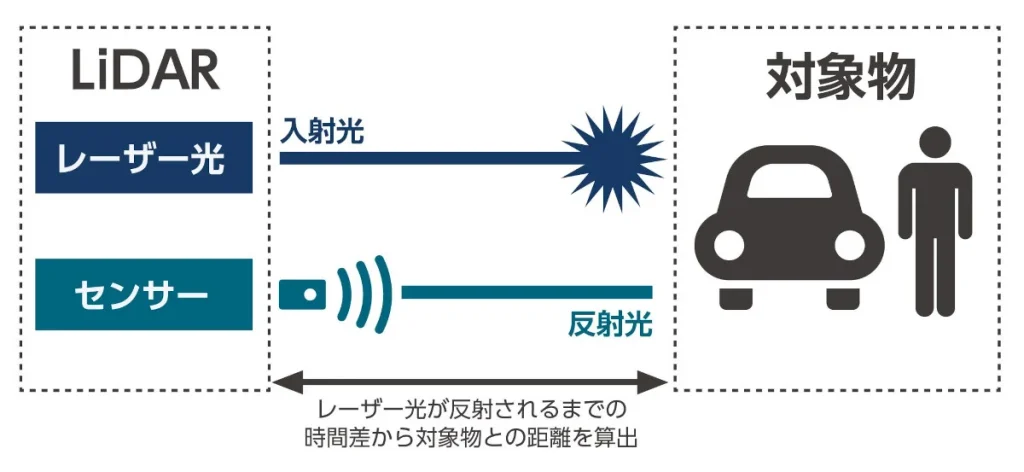
LiDARセンサーは、レーザー光を対象物に照射し、その反射が戻ってくるまでの時間から距離を算出するセンサーです。広い範囲を高精度かつ高速に計測できる点が特長で、自律移動ロボットの自己位置推定や地図作成(SLAM)、AGVの障害物回避、設備周辺の安全監視などに活用されています。
点群データによって空間を立体的に把握できるため、人や設備が混在する環境でも周囲状況を正確に認識しやすく、AMRやAGVの主要センサーとして採用されるケースが多く見られます。
超音波センサー
超音波センサーは、人の耳には聞こえない高周波の音波を発信し、その反射時間から距離を測定するセンサーです。構造がシンプルで低価格・省電力・小型化しやすい点が特長で、近距離の障害物検知や狭い場所での安全確認に向いています。
AMRでは、LiDARの死角を補う補助センサーとして使われることが多く、停止直前の接触防止などに効果を発揮します。
ToFカメラ

ToFカメラは、光の飛行時間(Time of Flight)を利用して距離を測定するカメラで、撮影した映像から三次元の空間情報を取得できる点が特長です。距離だけでなく、物体の位置関係や大きさ、高さ、体積といった情報まで把握できるため、周囲環境を立体的に認識する用途に適しています。
ToFカメラは赤外光などを対象物に照射し、その反射や戻ってくるまでの時間をもとに距離を算出するため、暗所でも安定して使用できます。距離情報を画像として取得できることから、単に障害物までの距離を測るだけでなく、物体の形状や高さの違いを捉えやすく、人と設備を判別する場面でも有効です。
この特性により、AMRやAGVでは、より精度の高い障害物認識や安全制御を実現する手段として活用されています。
◇停止位置がずれる原因
AMRの停止位置がずれる原因は一つではなく、複数の要因が重なって発生します。代表的なものとして、環境の変化、センサーの誤差、制御の遅れ、通信トラブルなどが挙げられます。
環境面
床の汚れや反射状態の変化、設備や棚の移動といった要素が位置認識に影響します。特にSLAM方式では、基準となる周囲環境が変わることで自己位置推定に誤差が生じやすくなります。
センサー誤差
LiDARやカメラは高精度ではあるものの、温度変化や経年劣化の影響を受け、測定値がわずかにずれる場合があります。このズレが積み重なることで、停止位置の誤差につながります。
制御面
減速指示から実際に停止するまでのタイムラグが影響します。特に積載重量が変わると制動距離も変化するため、負荷に応じた制御ができていないと停止位置が安定しません。
他にも、クラウドや上位システムと通信しながら動作するAMRでは、通信遅延や一時的な通信断が停止制御に影響することもあります。これらの要因が重なると、停止位置のばらつきや誤停止、場合によっては衝突リスクにもつながります。
そのため、AMRの停止精度を評価する際は、カタログ上の数値だけを見るのではなく、位置認識方式・センサー構成・現場環境との相性を含めて総合的に確認することが重要です。
【あわせて読みたい】
▼AMRのマッピングを行う上で重要なSLAMとセンサーの種類とは?
AMRロボットの停止精度を高めるには

AMRを安定して運用するためには、停止精度の確保が欠かせません。停止位置がわずかにずれるだけでも、受け渡しミスや設備との干渉、人との接触リスクにつながる可能性があります。ここでは、停止精度の向上に有効とされている代表的な考え方を、要点を絞って紹介します。
◇再マッピングを実施
停止精度を維持・向上させるうえで基本となるのが、定期的な再マッピングです。AMRは事前に作成した地図と、センサーで取得した周囲情報を照合しながら自己位置を推定しています。
そのため、設備移設やラック増設などでレイアウトが変わると、地図と実環境のズレが生じ、停止位置の誤差につながります。
特にSLAM方式では、周囲の特徴物を基準に位置を推定するため、環境変化の影響を受けやすい傾向があります。再マッピングによって最新の環境情報を反映させることで、自己位置推定の精度が回復し、停止位置のばらつきを抑えやすくなります。
◇AMR用のマーカーを使用

より高い停止精度が求められる場合は、マーカーを使った位置補正も有効です。床や壁に設置したマーカーをAMRが読み取ることで、自己位置を再補正できるため、自然環境の変化に左右されにくくなります。
設備前での正確な位置合わせや、受け渡し精度が厳しく求められる工程では、停止位置の再現性を高めやすい点が特長です。一方で、マーカーの設置や清掃などの保守が必要になるため、高精度が求められるポイントに限定して使われるケースが一般的です。
◇AGV走行が可能なAMRAMRを選ぶ
停止精度を重視する場合、AGV走行が可能なAMRを検討する方法もあります。AGV方式はガイドラインやマーカーを基準に走行するため、停止位置の再現性が高く、自動設備との連携に向いています。
近年は、自律走行とAGV走行を切り替えられるAMRもあり、通常エリアは柔軟に走行しつつ、精度が必要な区間だけAGV方式を使う運用も可能です。全体をAGV化するのではなく、必要なポイントに絞って併用することで、柔軟性と精度の両立が図れます。
停止精度の高い最新AMRロボット

最近では、停止精度に優れたAMRロボットも数多く販売されています。停止精度は、メーカーや機種によって異なるため、複数のメーカーと機種を比較して選ぶことが大切です。
こちらでは、停止精度の高い3つのモデルを解説します。
◇AMR600|テクトレ株式会社

AMR600は、高精度なAMRに協働ロボットのカメラ補正を組み合わせることで、±0.1mmという高い作業精度を実現できます。精度要求の厳しい現場にも対応でき、安定した自動化運用を支えます。
ローラーコンベヤと既存ラインとのドッキングもワンステップで行え、±5mmの位置精度を確保できるため、位置合わせにかかる時間ロスを抑えた効率的な移送が可能です。
また、360度レーザーセンサー、3Dビジョンセンサー、安全タッチセンサーを搭載しており、低い位置にある物体や障害物も検知できます。検知時には減速や停止を行うことで、安全性を確保しながら運用できます。
さらに、停止中のLiDAR検知情報を用いて協働ロボットを停止させる仕組みを備えており、安全面にも配慮した設計となっています。
◇iRAYPLE AMR|株式会社リンクス

iRAYPLE AMRは、棚の下に潜り込んで搬送を行う潜り込み式のAMRです。前方・後方にLiDARセンサーとToFカメラを標準搭載しており、大きさや高さの異なる障害物を適切に検知できます。これらのセンサーにより棚の位置ズレも把握でき、潜り込む際の角度を自動で調整するため、安定した棚搬送が可能です。
また、ナビゲーション方式をルートごとに設定できる点も特徴です。走行環境や求められる停止精度に応じて最適な方式を使い分けることで、柔軟かつ効率的な運用につなげられます。
停止位置精度は、コード方式やテクスチャ方式で±5mm、SLAM方式でも±10mmと高く、正確な位置決めが求められる現場にも対応できます。
◇VNK10-10 (B)|VisionNav Robotics

VNK10-10(B)は、SLAM技術とマルチセンサーを組み合わせた複合ナビゲーション方式を採用し、±5mmという高い停止精度を実現しています。
倉庫管理システムや倉庫制御システムなどの上位システムに加え、AGF(無人搬送フォークリフト)やロボットアームといった各種自動機器とも連携しやすく、タスク管理や在庫管理の最適化、保管効率の向上を支援します。
最大積載500kg、最高速度1.7m/sでも安全走行を確保できる設計となっており、生産性と安全性の両立が可能です。また、ナビゲーション用マーカーの貼り付けが不要なため、現場工事の負担を抑えつつ、導入期間を短縮しやすい点も特徴です。
【あわせて読みたい】
▼自社に適したAMRロボットを導入!選び方やおすすめメーカーを紹介
停止精度とともに確認しておきたいAMRの性能

AMRロボットを導入することは、作業現場の業務効率化やコスト削減にも役立ちます。安全性を確保するためには、静止精度と障害物回避能力が重要ですが、業務効率化を図るためには、積載重量、走行スピード、ダウンタイム率の確認が必要です。
◇積載重量
AMRロボットに載せられる荷物の重さのことです。積載重量は機種によって異なり、大きければ大きいほど一度の多くの荷物を運搬できるため、AMRロボットを稼働させる回数を減らせます。最近では、最大可搬重量が1,900キログラムの高効率なAMRロボットも販売されています。
しかし、一般的に、積載重量が大きければ大きいほど本体のサイズが大きくので、積載重量が大きい機種は、狭い通路や複雑なレイアウトの作業場には導入しづらいのがデメリットです。
積載重量が大きくなると価格も高額になるため、予算との兼ね合いも重要になります。
◇走行スピード
走行スピードも、作業効率を左右します。AMRロボットの走行スピードは、秒速1~2m、時速にして3.6~7.2kmくらいです。走行スピードはWebサイトやカタログに記載されていますが、あくまでも直線の通路で荷物を乗せずに走らせた場合の走行スピードです。
曲がり角が多かったり、荷物を大量に乗せたりした場合は、走行スピードは遅くなります。記載されている情報を鵜呑みにしてしまうと、思っていたほど業務の効率化が図れないこともあるため、注意が必要です。
◇ダウンタイム率
ダウンタイムとは、AMRロボットが稼働していない時間のことで、具体的には、充電期間、停止時間、ロボットの迷子、修理やメンテナンスにかかる時間などです。ダウンタイム率が高いほど、稼働率が下がり作業効率も低下します。ダウンタイム率の低いAMRロボットの特徴は、以下のとおりです。
- 充電期間が短く稼働時間が長い・メンテナンスがしやすく丈夫で故障しやすい
- 迷子になったらAMRロボットの位置確認が確認できる
- サポート体制がしっかりとしているメーカーの製品
【あわせて読みたい】
▼AMRロボットの一般的な速度は?高速AMRロボットの魅力と安全性
おすすめのAMRメーカー・販売店3選
AMRを導入する際は、ロボット本体の性能だけでなく、導入支援や運用サポート、現場理解の深さまで含めてメーカーや販売店を選ぶことが重要です。こちらでは、AMR導入を検討する企業にとって信頼性が高く、実績や支援体制の面でも評価されているメーカー・販売店を3社紹介します。
◇大喜産業株式会社

大喜産業株式会社は、FA機器や自動化ソリューションを幅広く取り扱う技術商社として、AMR分野でも高い存在感を示しています。単なる製品販売にとどまらず、現場課題に即した提案力と、導入前後を通じた手厚い支援体制が強みです。
AMR導入にあたっては、現場の動線や作業内容を丁寧にヒアリングし、どの工程を自動化すべきかを整理したうえで、最適な機種や運用方法を提案しています。これにより、導入後に「想定した効果が出ない」といったミスマッチを防ぎやすくなります。
また、AMR単体の導入ではなく、人との協働を前提とした自動化構想を重視している点も特徴です。作業者との役割分担や安全対策を含めた全体設計により、省人化と安全性の両立を目指しています。
| 会社名 | 大喜産業株式会社 |
| 営業本部 | <住所> 〒550-0012 大阪府大阪市西区立売堀1-5-9 <電話番号> 06-6541-1987 |
| 営業本部東京オフィス | <住所> 〒100-0004 東京都千代田区大手町1-5-1 大手町ファーストスクエア4F <電話番号> 03-5219-1463 |
| 大阪支店 | <住所> 〒550-0012 大阪府大阪市西区立売堀1-5-9 <電話番号> 06-6532-0751 |
| 東京支店 | <住所> 〒333-0815 埼玉県川口市北原台3-2-21 <電話番号> 048-297-1388 |
| 東京支店つくばオフィス | <住所> 〒305-0031 茨城県つくば市吾妻1-5-7 ダイワロイネットホテルつくば2F <電話番号> 029-817-4844 |
| 名古屋支店 | <住所> 〒452-0805 愛知県名古屋市西区市場木町416 <電話番号> 052-505-8201 |
| 東大阪支店 | <住所> 〒581-0861 大阪府八尾市東町4-1 <電話番号> 072-997-0123 |
| 京滋支店 | <住所> 〒520-3047 滋賀県栗東市手原3-2-3 <電話番号> 077-553-6155 |
| 四国支店 | <住所> 〒761-0301 香川県高松市林町2554-1 <電話番号> 087-868-4511 |
| 九州支店 | <住所> 〒812-0895 福岡県福岡市博多区竹下2-4-7 <電話番号> 092-441-0198 |
| 営業時間 | 公式サイトに記載なし |
| 公式ホームページ | https://www.daiki-sangyo.co.jp/ |
導入後の立ち上げ支援や運用改善のフォローも充実しており、初めてAMRを導入する企業でも相談しやすい体制が整っています。
大喜産業株式会社の口コミ評判記事はこちら!
▼MiR社の魅力的なMiR製品とその販売代理店・大喜産業とは
さらに詳しい情報は公式ホームページでも確認できます。ぜひチェックしてみてください。
◇Gaussy株式会社
Gaussy株式会社は、ロボットやAI技術を活用した業務効率化に取り組む企業で、AMRを含むロボット活用の提案力に強みを持っています。機器の導入そのものを目的とするのではなく、業務プロセス全体を見直す視点を重視し、物流・製造現場における課題解決型の支援を行っています。
AMR分野では、搬送業務の自動化を軸に、データ活用や業務の可視化を組み合わせた提案が特徴です。AMRの稼働データをもとに工程ごとのボトルネックを分析し、運用改善につなげるといった取り組みも行われています。
| 会社名 | Gaussy株式会社 |
| 所在地 | 〒105-0012 東京都港区芝大門2-1-16 +SHIFT SHIBADAIMON 8F |
| 営業時間 | 公式サイトに記載なし |
| 公式ホームページ | https://roboware.ai/ |
また、新しい技術やサービスの導入にも積極的で、特定メーカーに依存せず、現場に適したロボットを柔軟に組み合わせる姿勢を持っています。そのため、顧客の業務内容に応じた最適なAMR活用を検討しやすい点も特長です。
こちらも併せてご覧ください。
▼AMRとは?メディア厳選!搬送ロボット3選【搬送ロボットガイド】
◇ASPINA(シナノケンシ株式会社)

ASPINAは、シナノケンシ株式会社が展開するブランドで、長年にわたりモータや精密機器の開発を手がけてきた技術力を背景に、ロボティクス分野でも高い評価を得ています。AMRにおいても、堅実な設計思想と高い信頼性を重視した製品開発が特徴です。
ASPINAのAMRは、安定した走行性能と制御技術を強みとしており、長時間稼働や比較的厳しい使用環境でも安定した運用が期待できます。また、国内メーカーとしての強みを活かし、品質管理やサポート体制にも注力しています。
| 会社名 | シナノケンシ株式会社 |
| 所在地 | 〒386-0498 長野県上田市上丸子1078 |
| 電話番号 | 0268-41-1800 |
| 営業時間 | 公式サイトに記載なし |
| 公式ホームページ | https://jp.aspina-group.com/ja/ |
導入支援では、安全性や停止精度、障害物回避といった基本性能を重視した検討が行われるため、AMR導入にあたって信頼性や安全性を重視したい企業に適しています。
シナノケンシ株式会社の口コミ評判記事はこちら!
▼ASPINA シナノケンシ株式会社の自律走行搬送ロボット「AspinaAMR」
まとめ

今回は、AMRロボットの停止精度について解説しました。
AMRロボットの停止精度は、カタログ数値だけで判断するのではなく、位置認識方式、センサー構成、制御方法、そして現場環境との相性まで含めて総合的に確認することが重要です。
SLAM方式やマーカー併用、AGV走行対応など、方式によって得意・不得意が異なるため、求める精度レベルや作業内容に応じた選定が欠かせません。
停止精度を正しく見極めることで、搬送トラブルや無駄な調整を減らし、AMR本来の省人化・効率化効果を引き出しやすくなります。
導入前には、停止精度を「数値」だけでなく「運用の中でどう活きるか」という視点で確認し、現場に適したAMRを選ぶことが成功のポイントです。
AMRの導入を検討している方の参考になれば幸いです。
この記事を読んでいる人におすすめ
▼WCS倉庫制御システムとAMRの連携による物流の進化とは?
▼ヘルスケア・医療分野におけるAMR(自律走行搬送ロボット)の活用方法とは?